|
I am a Research Lead at RBC Borealis, where I develop advanced machine learning and deep learning solutions with enterprise-scale business impact. My work bridges research and applied AI, with contributions spanning predictive modeling, fraud detection, and pricing systems.
Email / Google Scholar / LinkedIn / Github / CV |

|
|
My research interests include robotics, reinforcement and imitation learning, simulation-to-reality transfer, natural language processing, and vision-and-language navigation. More recently, I have been working on time-series forecasting research. During my Ph.D. studies, I was adviced by Cordelia Schmid and co-adviced by Ivan Laptev. I also had a pleasure to work with Chen Sun during my internship at Google Research. |
|
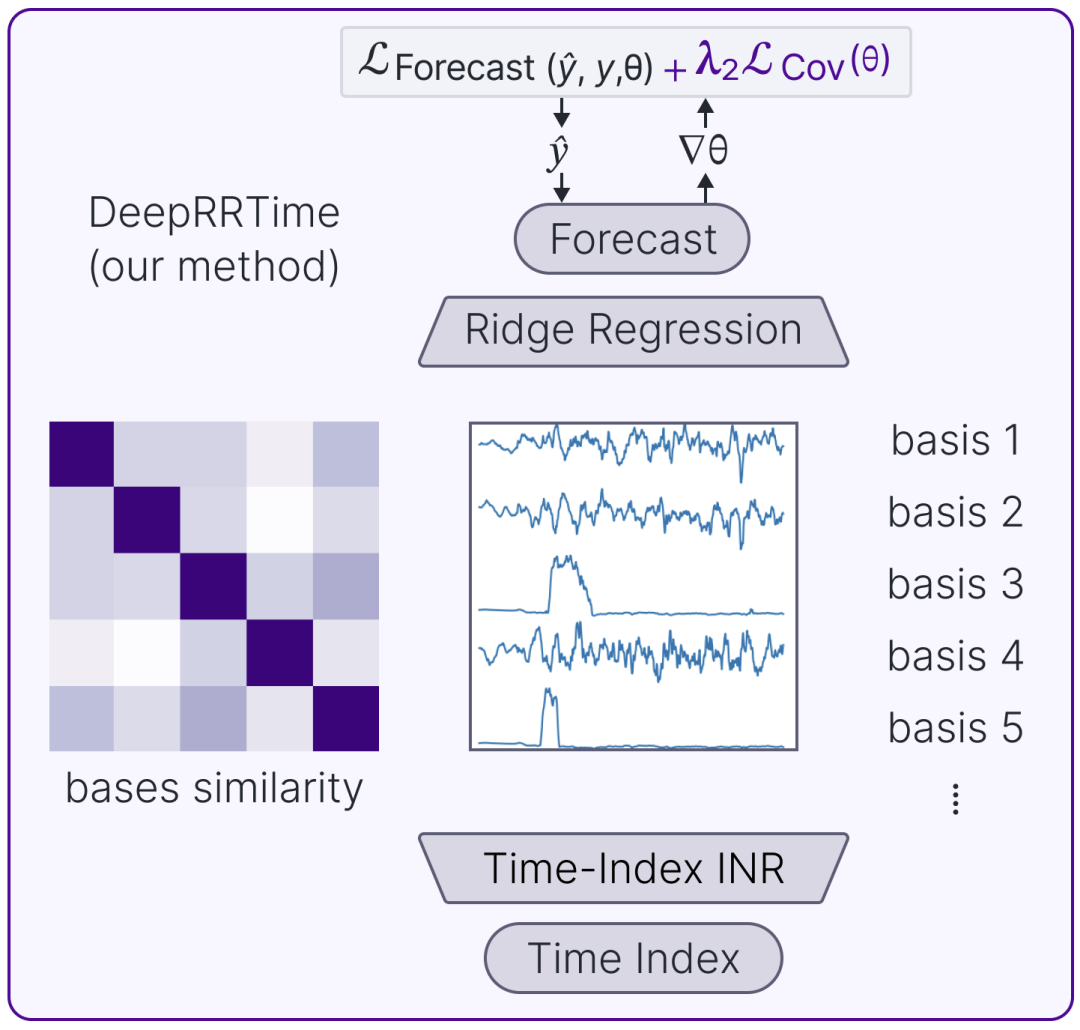
Chandramouli Sastry, Mahdi Gilany, Yik Chau Lui, Martin Magill, Alexander Pashevich Transactions on Machine Learning Research (TMLR), 2025 bibtex A simple, inexpensive, theoretically motivated regularization term to enhance the robustness of deep time-index models for time-series forecasting. |
|
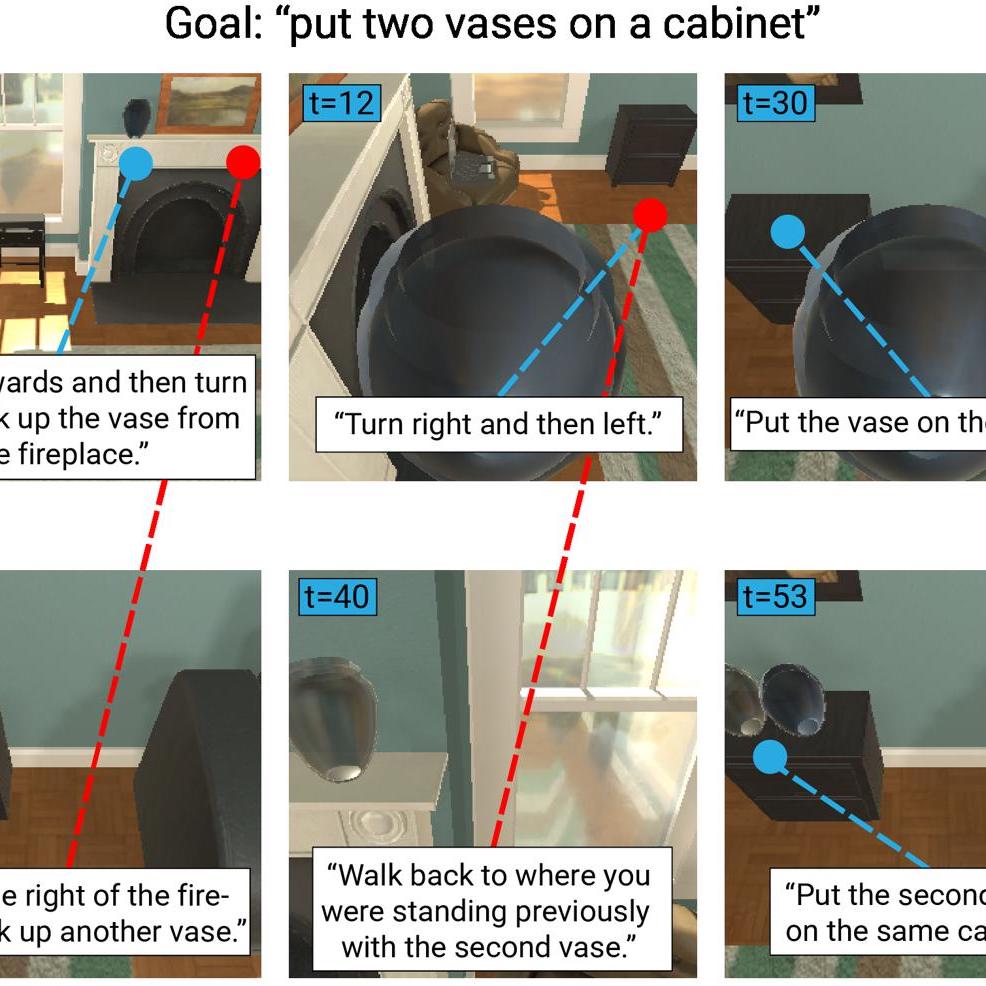
Alexander Pashevich, Cordelia Schmid, Chen Sun ICCV, 2021 bibtex / code / website A multimodal transformer-based architecture for vision-and-language navigation (VLN) improving results on a challenging task by 74%. |
|
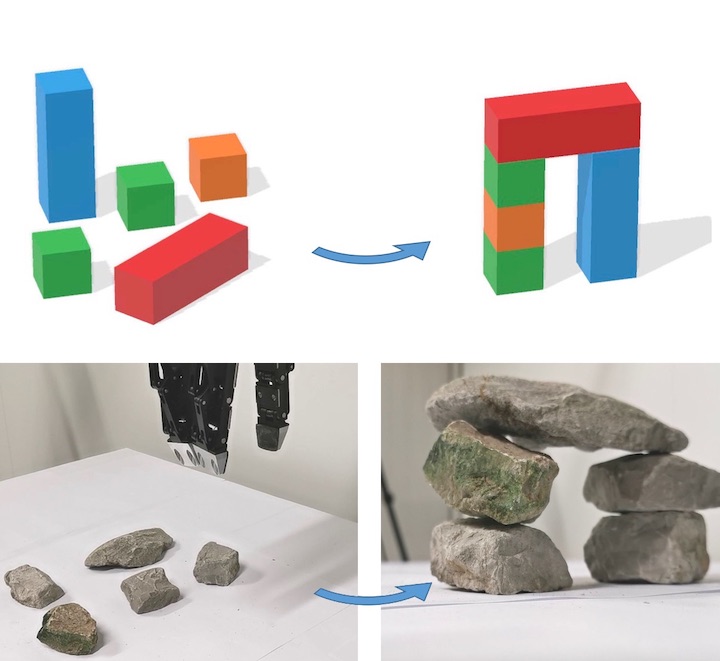
Alexander Pashevich*, Igor Kalevatykh*, Ivan Laptev, Cordelia Schmid IROS, 2020 bibtex / website / video An approach learning to build shapes by disassembly that combines learning in low-dimensional state space and high-dimensional observation space. |

|
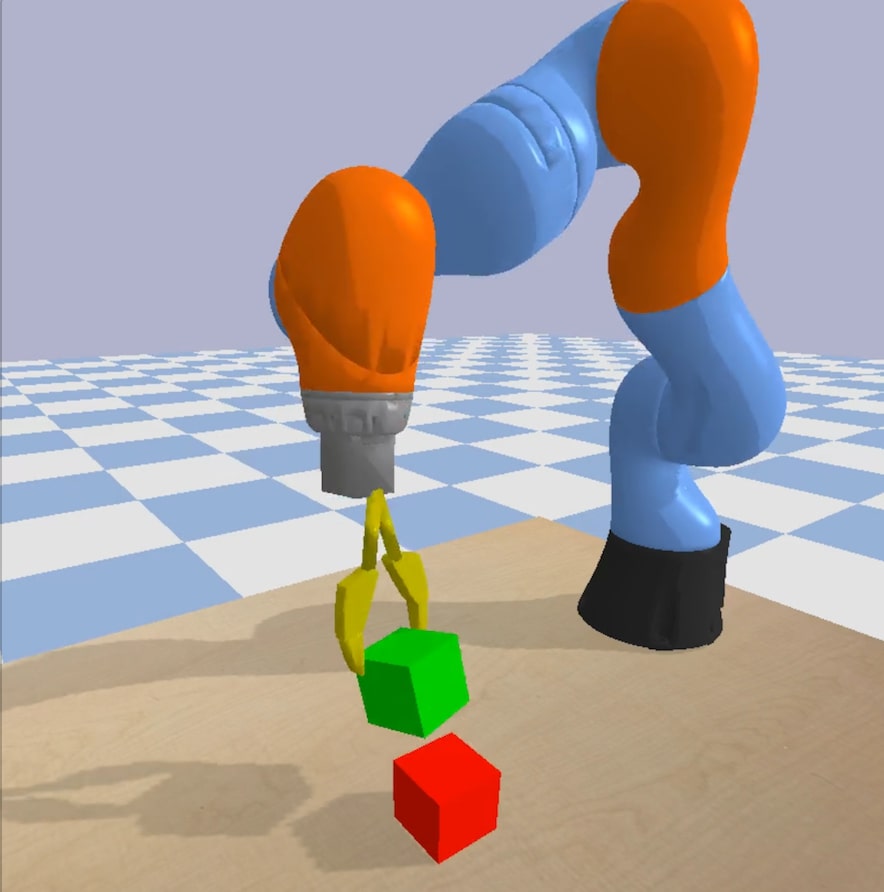
Robin Strudel*, Alexander Pashevich*, Igor Kalevatykh, Ivan Laptev, Josef Sivic, Cordelia Schmid ICRA, 2020 bibtex / code / website / video A reinforcement learning approach to task planning that learns to combine primitive skills learned from demonstrations. |
|
Alexander Pashevich*, Robin Strudel*, Igor Kalevatykh, Ivan Laptev, Cordelia Schmid IROS, 2019 bibtex / code / website / video An approach for transferring policies learned in simulation to real-world robots by exploiting parallel computations. |
|
Alexander Pashevich, Danijar Hafner, James Davidson, Rahul Sukthankar, Cordelia Schmid NeurIPS Deep RL Workshop, 2018 bibtex / poster A hierarchical reinforcement learning approach for learning from sparse rewards. |
|
Richard Marriott, Alexander Pashevich, Radu Horaud Pattern Recognition Letters, 2018 bibtex An algorithm for unsupervised extraction of piecewise planar models from depth data using constrained Gaussian mixture models. |
|
|